被写体検出
技術概要
撮影する対象物を画像において認識できることにより、その対象物に自動で合焦させることや追尾すること、大量の画像を自動で分類することなどが可能になります。ロボットの目としては認識した対象物に応じて自律的に行動をさせることができます。
特定したい被写体の特徴と画像に含まれている特徴が適合するか判断することになります。そのために、特定したい被写体の特徴を定義すること、例えば鳥であればどんな鳥でも良い場合のように被写体の画像に幅がある場合には特定したい被写体の様々な画像を学習して特徴を得ます。一方で画像に含まれている特徴を取り出すために、まずは被写体が含まれていると推定される領域を切り出します。切り出された領域における特徴が定義した特定したい被写体の特徴に適合するか判断します。

カメラでは、ユーザが所望する被写体に焦点を合わせるために、さまざまな撮影条件の画像にたいして多様な被写体を瞬時に認識できるようにする必要があります。
ロボットビジョンでは、制限された撮影条件の画像から、部品を検出するだけでなくその部品をピッキングするために部品の姿勢を推定することも求められます。
技術の適用事例
カメラ
Z 9では、ニコン初となる120回/秒の高速AF演算、ディープラーニング技術を用いて開発した優れた被写体検出、Z マウントならではの高速AF情報通信の3つのテクノロジーが融合し、高速連続撮影中でもランダムに動く被写体を正確に捉える高次元のAF追従性能を実現しています。被写体検出では、ディープラーニング技術を用いて開発したアルゴリズムを搭載することで、人物、犬、猫、鳥、車、バイク、自転車、列車、飛行機という9種類の被写体検出が可能です。人物検出では、従来よりも小さなサイズの瞳を検出できるほか、ゴーグルやサングラス越し、人物の顔が逆さまの状態であっても瞳の検出できます。体操の床運動選手が宙返りをし、従来ならピントが外れるような激しい動きのあるシーンでも、自動的に頭部や胴体を瞬時に検出するためピントを合わせ続けることを可能にしています。


この事例に関連する技術
関連技術
画像認識
画像の中から識別したい特徴を抽出し認識できることにより、人が物体や状況を認識して機械に指示する代わりに、認識の段階から機械が自動で行うことが可能になります。産業用途では自動化の適用範囲が広がり、生産性の向上につながります。
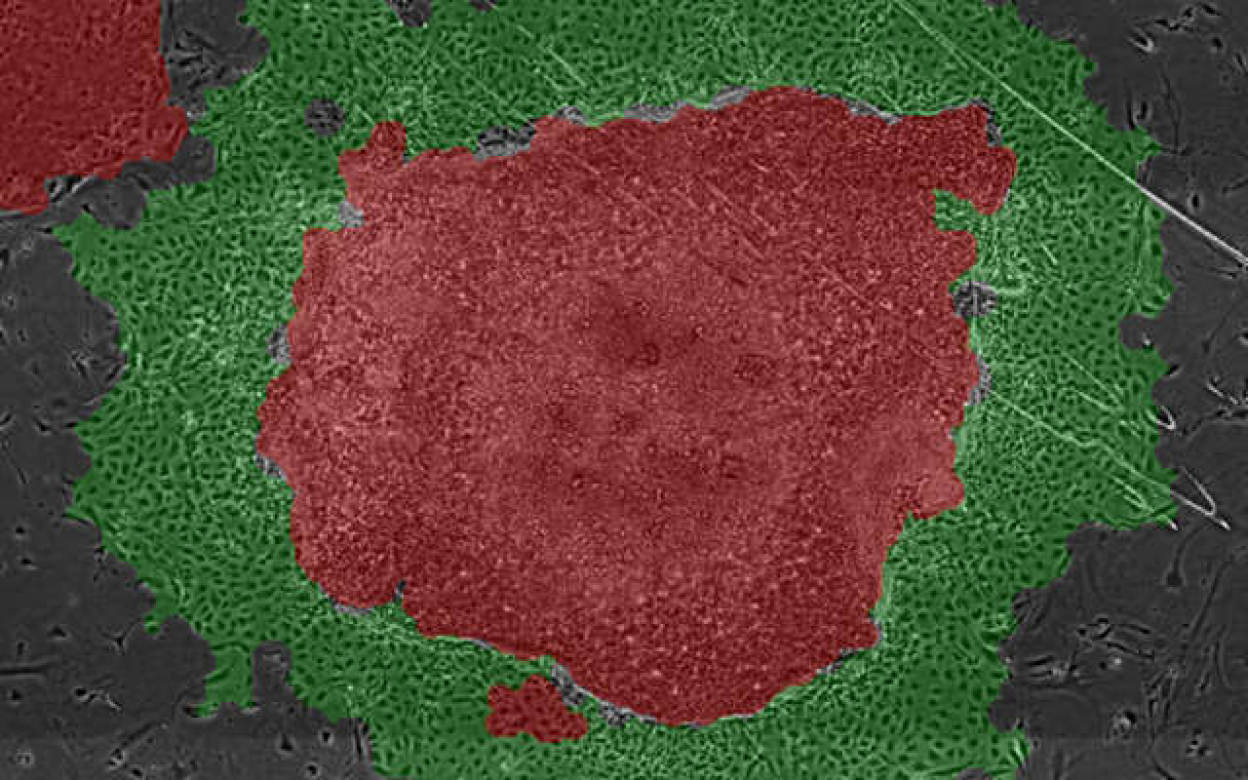
細胞培養でのスクリーニングなどでは、非染色イメージングで得られる顕微画像から、幹細胞コロニーの自動識別やカウントなどができることが求められます。
生産工程では、人が目視で行っていた検査の代わりに、撮影した画像から部品や外観の欠陥の有無を自動で判断することができます。
関連する主な製品



ニコンの技術、研究開発に関する記事をタグ検索できます。